近日,91色情片
邓嵘教授团队在国际权威期刊《 Expert Systems with Applications 》发表题为 “DeepV2P-Net: A deep visual-to-perception network for multi-dimensional affective response prediction in robot design engineering” 的研究成果。论文第一作者为91色情片
博士研究生牛世繁,通讯作者为91色情片
邓嵘教授。该期刊为中科院一区TOP期刊,JCR一区期刊,是人工智能与工程设计领域国际权威期刊。该研究成果体现了人工智能视域下91色情片
在设计学学科交叉研究及智能设计方法方向上的持续探索。
该研究的主要贡献概括如下。
第一,提出了一种三组件级联式网络架构,包括预训练主干网络、视觉—感知颈部模块(Visual-to-Perception Neck,V2P Neck)和感知引导预测头。其中,预训练主干网络用于提取层级化视觉特征;V2P Neck 模块融合多尺度特征金字塔结构与可变形注意力机制,以自适应捕获与设计相关的视觉模式;感知引导预测头则用于生成不同感知维度的特异性预测结果。该架构仅使用 7.96M 参数,便实现了显著优于现有基线模型的性能。
第二,提出了一种按维度归一化策略,用于系统性解决多维感知工程预测中的尺度异质性问题。通过将各个维度的目标值独立映射到统一数值区间,该策略确保损失函数能够对所有输出维度给予均衡关注。
第三,在两个具有显著差异的设计领域中开展了系统性实验验证:在机器人工程数据集上取得了领先性能;同时,在汽车设计眼动追踪数据集上验证了模型的跨域泛化能力,首次证明了将视觉—感知映射模型从拟人机器人设计迁移至工业产品工程设计的可行性。
第四,通过全面的消融实验量化了各个架构组件对模型性能的贡献,揭示了 V2P Neck、多尺度特征融合和感知引导预测头等模块在提升模型性能中的关键作用,为后续研究提供了可复现的方法学基准和技术参考。
从机器人设计到人类情感感知,DeepV2P-Net 的提出展示了人工智能赋能设计学发展的潜力。它不仅为机器人设计工程提供了一种高效、可复现的感知预测方法,也为设计学科如何在人工智能时代实现理论创新、方法创新与工具创新提供了重要启示。
面向未来,91色情片
将继续围绕人工智能设计科学、智能产品设计、人机交互与感知计算等方向开展深入研究,推动设计学与人工智能、工程技术、认知科学和数据科学的深度融合,为建设具有全球视野、面向未来产业需求的设计学科体系贡献江南设计力量。
论文信息:
Title: DeepV2P-Net: A deep visual-to-perception network for multi-dimensional affective response prediction in robot design engineering
Journal: Expert Systems with Applications
DOI://doi.org/10.1016/j.eswa.2026.132738
First Author: Shifan Niu / 牛世繁
Corresponding Author: Prof. Rong Deng / 邓嵘教授
Affiliation: School of Design, Jiangnan University / 91色情片
图1 发表期刊页面截图
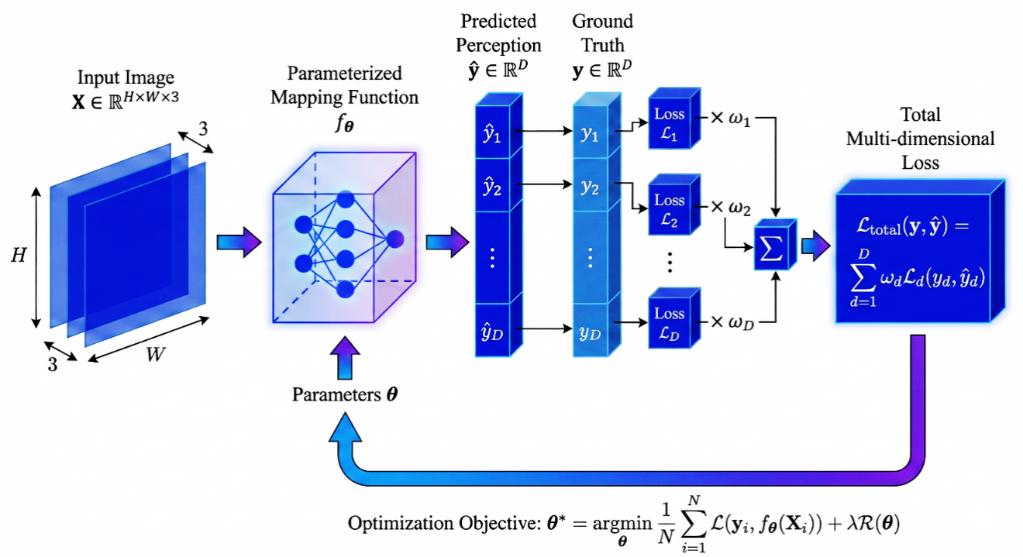
图2 论文中的视觉-感知映射的逻辑架构图
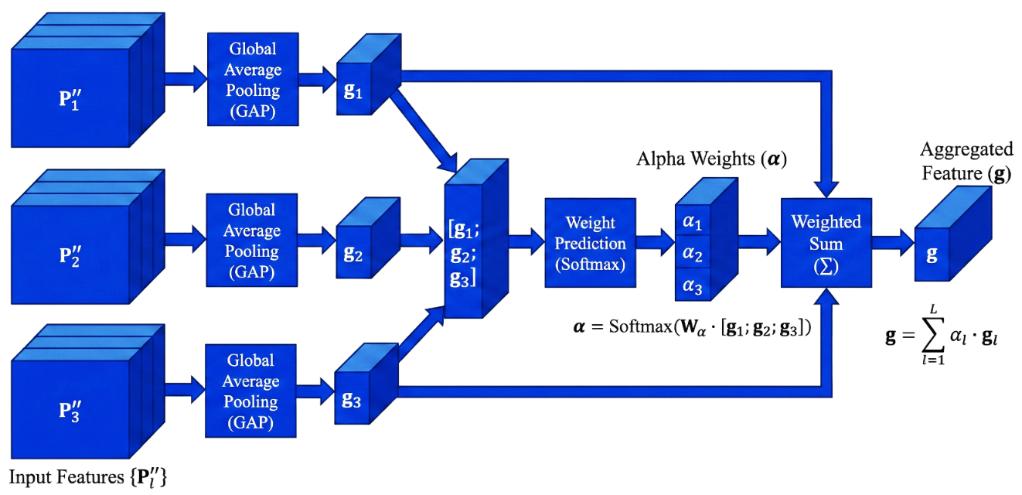
图3 论文提出的 DeepV2P-Net 预测头网络结构图
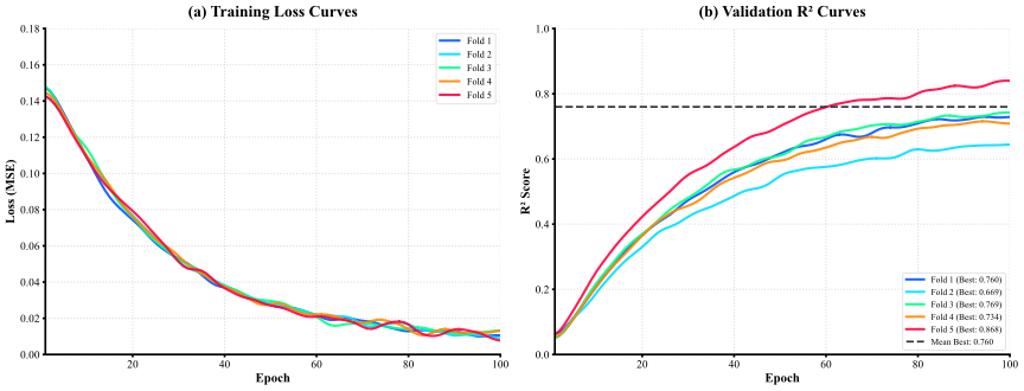
图4 论文中的五重交叉验证过程的学习曲线
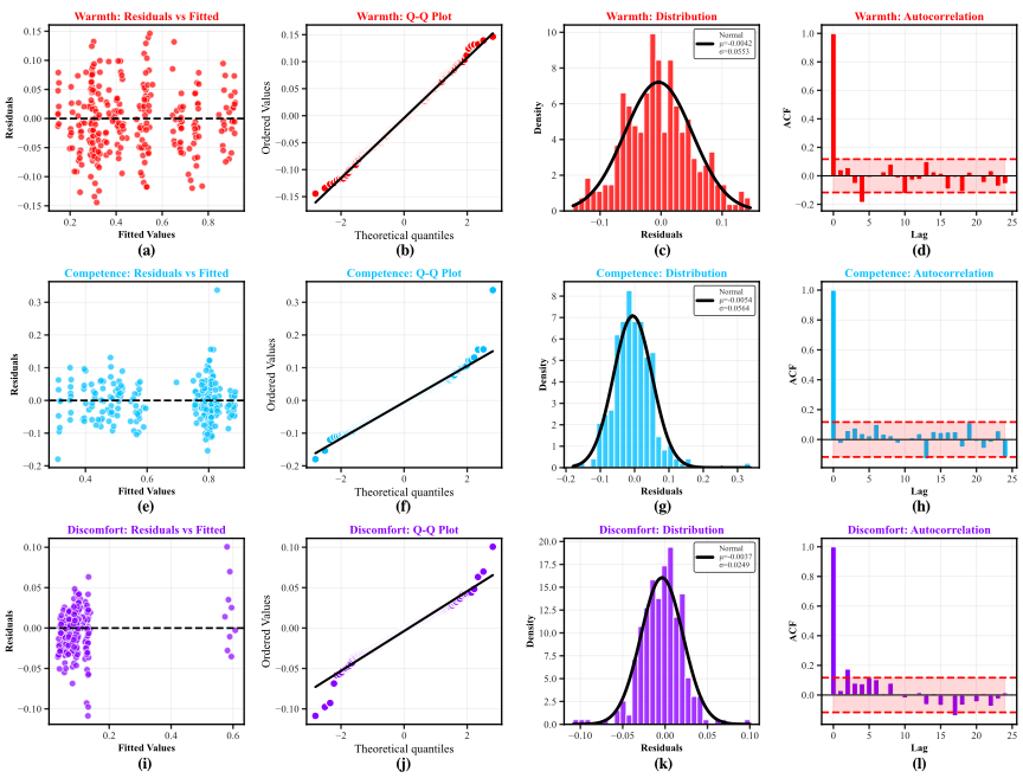
图5 论文中的综合误差分析图
 NEWS
NEWS